Last updated on
强化学习简介
强化学习(英语:Reinforcement learning,简称 RL)是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益
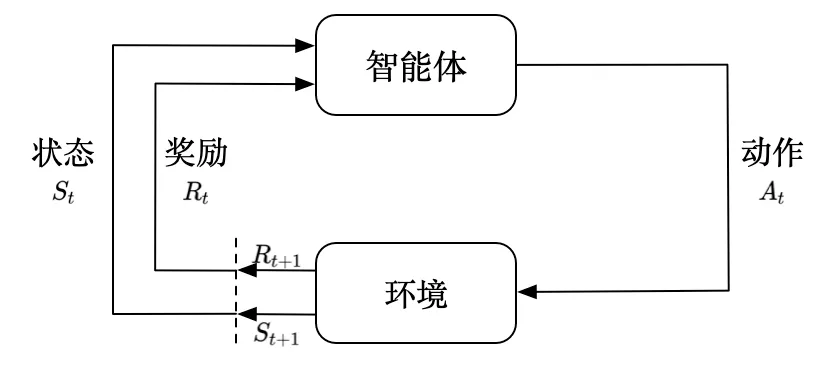
强化学习讨论的问题是一个智能体(agent) 怎么在一个复杂不确定的环境(environment)里面去极大化它能获得的奖励。
例子
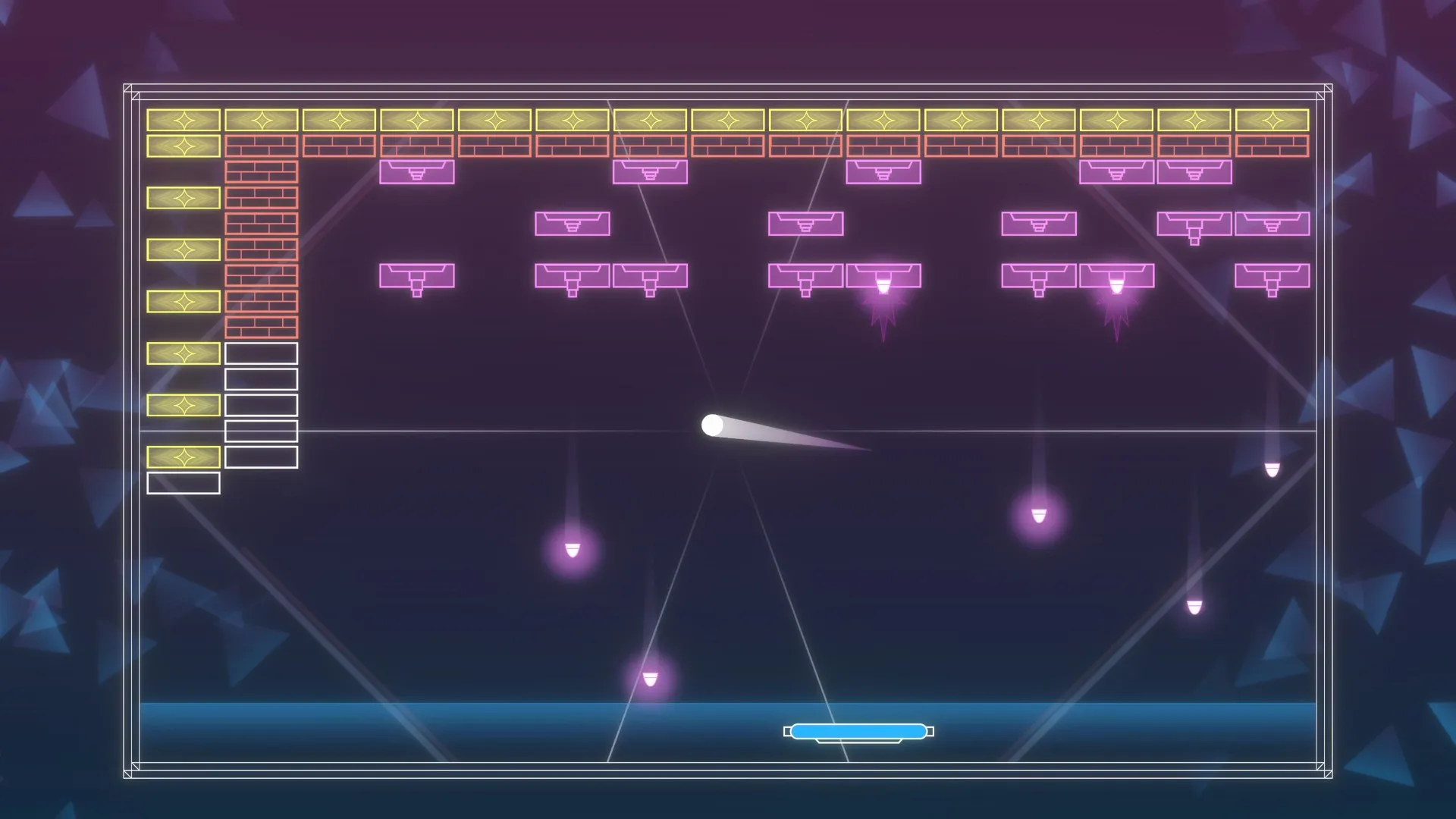 Atari 游戏
Atari 游戏
在游戏过程中,大家可以发现这个 agent 得到的观测不是个独立同分布的分布,上一帧下一帧其实有非常强的连续性。
另外一点,在玩游戏的过程中,你并没有立刻获得反馈,没有告诉你哪个动作是正确动作。所以强化学习这么困难的原因是没有得到很好的反馈,然后你依然希望 agent 在这个环境里面学习。
强化学习的训练数据就是这样一个玩游戏的过程。你从第一步开始,采取一个决策,比如说你把这个往右移,接到这个球了。第二步你又做出决策,得到的训练数据是一个玩游戏的序列。
Agent 获得自己能力的过程中,其实是通过不断地试错探索(trial-and-error exploration)。
探索(exploration)和利用(exploitation)是强化学习里面非常核心的一个问题。
探索:你会去尝试一些新的行为,这些新的行为有可能会使你得到更高的奖励,也有可能使你一无所有。
利用:采取你已知的可以获得最大奖励的行为,你就重复执行这个动作就可以了,因为你已经知道可以获得一定的奖励。
因此,我们需要在探索和利用之间取得一个权衡。
MDP
无数学者们通过几十年不断地努力和探索,提出了一套可以解决大部分强化学习问题的框架,这个框架就是马尔科夫决策过程,简称 MDP。下面我们会循序渐进地介绍马尔科夫决策过程:先介绍马尔科夫性,再介绍马尔科夫过程,最后介绍马尔科夫决策过程。
Markov Process(MP)
Markov Property
如果一个状态转移是符合马尔可夫的,那就是说一个状态的下一个状态只取决于它当前状态,而跟它当前状态之前的状态都没有关系。
我们设状态的历史为 h={s1,s2,s3...st} , 如果一个状态转移是符合马尔可夫的,也就是满足如下条件:
p(st+1∣st)=p(st+1∣ht)
p(st+1∣st,at)=p(st+1∣ht,at)
Markov Process/Markov Chain
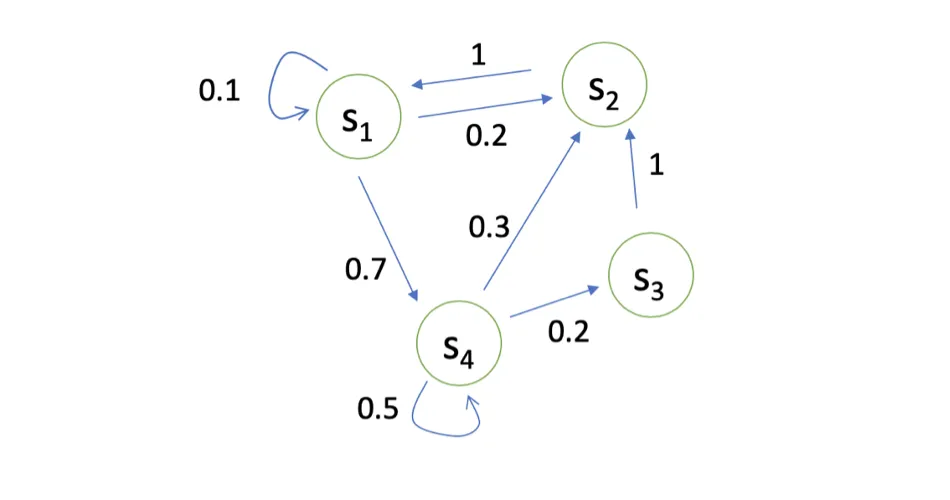 我们可以用状态转移矩阵(State Transition Matrix) P 来描述状态转移 p(st+1=s′∣st=s) :
我们可以用状态转移矩阵(State Transition Matrix) P 来描述状态转移 p(st+1=s′∣st=s) :
P=p(s1∣s1)p(s1∣s2)⋮p(s1∣sN)p(s2∣s1)p(s2∣s2)⋮p(s2∣sN)⋯⋯⋱⋯p(sN∣s1)p(sN∣s1)⋮p(sN∣sN)
Markov Reward Process(MRP)
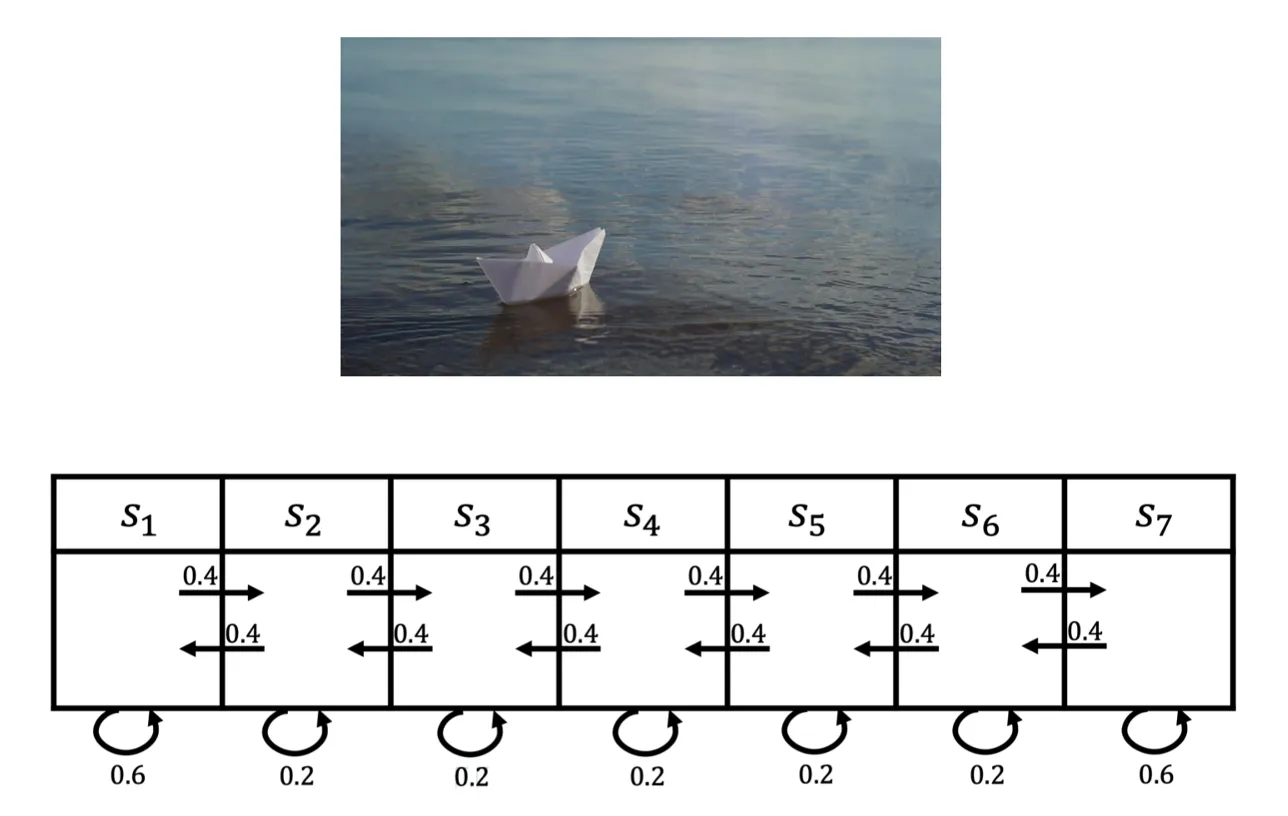
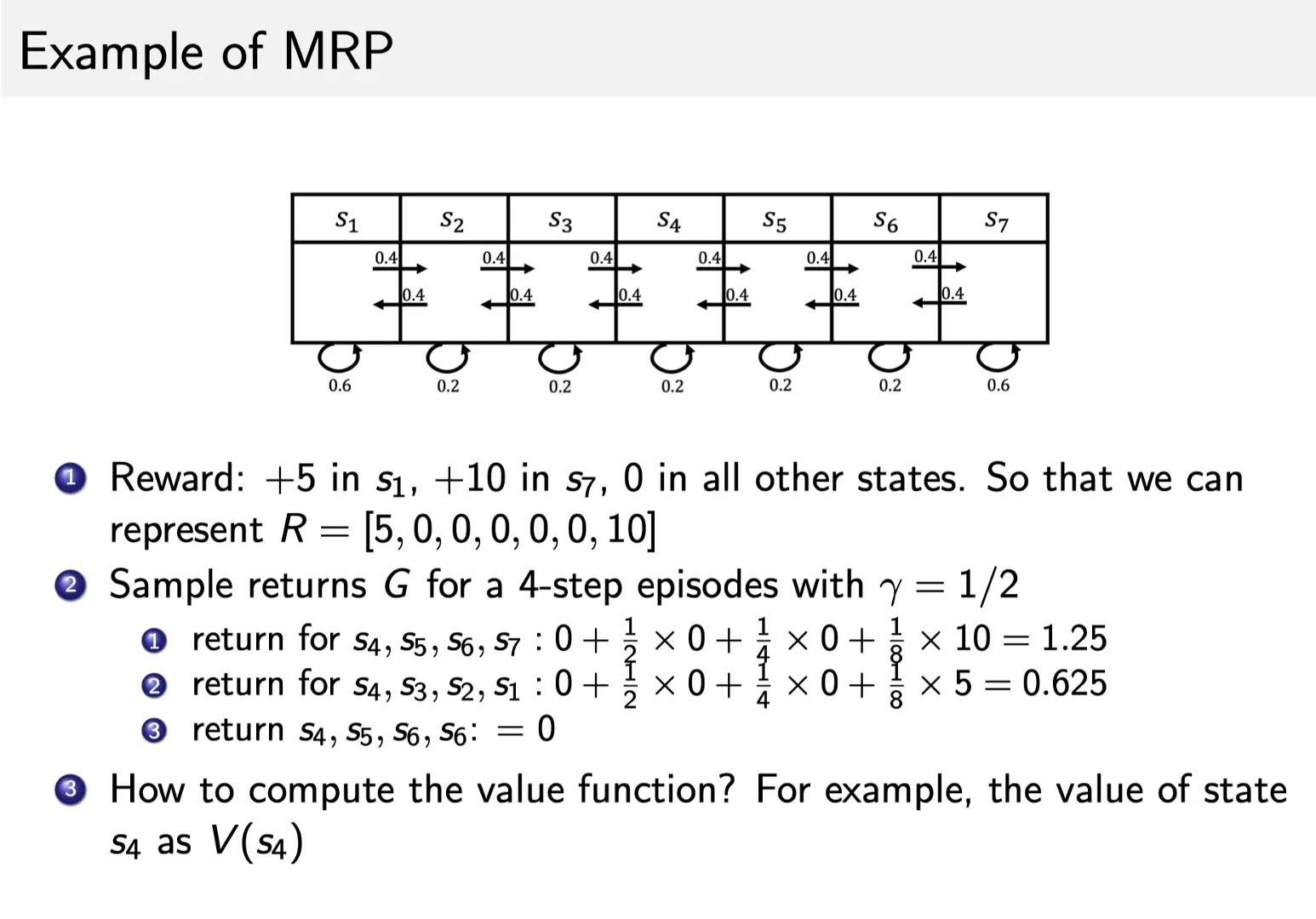
这里是我们刚才看的马尔可夫链,如果把奖励也放上去的话,就是说到达每一个状态,我们都会获得一个奖励。这里我们可以设置对应的奖励,比如说到达 s1 状态的时候,可以获得 5 的奖励,到达 s7 的时候,可以得到 10 的奖励,其它状态没有任何奖励。因为这里状态是有限的,所以我们可以用向量 R=[5,0,0,0,0,0,10] 来表示这个奖励函数,这个向量表示了每个点的奖励大小。
我们通过一个形象的例子来理解 MRP。我们把一个纸船放到河流之中,那么它就会随着这个河流而流动,它自身是没有动力的。所以你可以把 MRP 看成是一个随波逐流的例子,当我们从某一个点开始的时候,这个纸船就会随着事先定义好的状态转移进行流动,它到达每个状态过后,我们就有可能获得一些奖励。
Return(回报) 说的是把奖励进行折扣后所获得的收益。Return 可以定义为奖励的逐步叠加,如下式所示:
Gt=Rt+1+γRt+2+γ2Rt+3+γ3Rt+4+⋯+γT−t−1RT
当我们有了 return 过后,就可以定义一个状态的价值了,就是 state value function。对于 MRP,state value function 被定义成是 return 的期望,如下式所示:
Vt(s)=E[Gt∣st=s]
Markov Decision Process(MDP)
相对于 MRP,马尔可夫决策过程(Markov Decision Process)多了一个 decision,其它的定义跟 MRP 都是类似的
状态转移也多了一个条件,变成了 P(st+1=s′∣st=s,at=a) 你采取某一种动作,然后你未来的状态会不同。未来的状态不仅是依赖于你当前的状态,也依赖于在当前状态 agent 采取的这个动作。
同样的,价值函数变为R(st=s,at=a)=E[rt∣st=s,at=a]
Policy in MDP
π(a∣s)=P(at=a,st=s)
概率就代表了在所有可能的动作里面怎样采取行动,比如可能有 0.7 的概率往左走,有 0.3 的概率往右走,这是一个概率的表示
Pπ(s′∣s)=a∈A∑π(a∣s)∗P(s′∣s,a)
Rπ(s)=a∈A∑π(a∣s)∗R(s,a)
状态-价值函数(state-value function)
vπ(s)=Eπ[Gt∣st=s]
Q 函数(Q-function) 也被称为 action-value function
Q 函数定义的是在某一个状态采取某一个动作,它有可能得到的这个 return 的一个期望
qπ(s,a)=Eπ[Gt∣st=s,at=a]
Bellman Equation
V(s)=E[Gt∣st=s]=E[Rt+1+γRt+2+γ2Rt+3+⋯∣st=s]=E[Rt+1∣st=s]+γE[Rt+2+γRt+3+γ2Rt+4+⋯∣st=s]=R(s)+γE[Gt+1∣st=s]=R(s)+γE[V(st+1)∣st=s]
好玩的例子
https://gym.openai.com/videos/2019-10-21—mqt8Qj1mwo/MountainCar-v0/original.mp4